URCAP
Gentle URCap Software for UR Robots
The integration of our Gentle soft grippers with your UR robot is now easier than ever. We have developed a URCap* that makes the gripper installation a breeze and put you in production in literally minutes.
Here are a few key benefits:
- Tool center point (TCP) is auto installed.
- Digital output pin can be selected by the user.
- Gripper settings can be tested during installation.
- Open/Close commands can be changed with a single button click.
*UR+ certification in progress.
URCap (Download for Free)
This element is available for download free of charge
URCap Feature Overview & Compatibility
Our URCap adds a tool center point installation node, a gripper configuration installation node, a gripper actuation program node and a toolbar for actuating the gripper outside of program execution (e-Series only). Available for PolyScope 5.2+ (e-Series) and PolyScope 3.8+ (CB-series).
Universal Robots e-Series
Installation
Copy the URCap downloaded from https://www.ubiros.com/urcap.html to a blank USB drive. Insert the USB drive into the teach pendant or controller. Press the hamburger menu button in the top right (Figure 4) and choose “Settings → System → URCaps → +” (Figure 5). Navigate the available drives to find and select the .urcap file. Restart PolyScope to finish installation. To add a TCP configuration, see the TCP Configuration section.
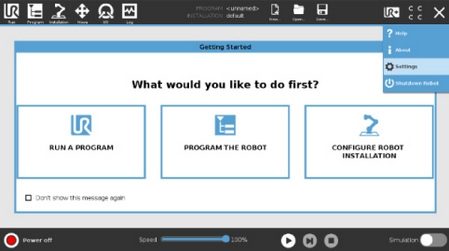
Figure 4 Settings, e-Series

Figure 5 Installation, e-Series
Uninstallation
To uninstall this URCap, navigate back to the screen shown in Figure 5, select the URCap and press the “-“ button.
Tool Center Point (TCP) Configuration
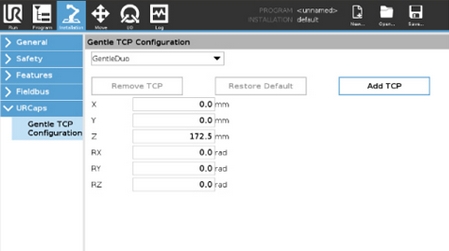
Figure 6 TCP Configuration, e-Series
To install the Tool Center Point (TCP), choose your Gentle product from the dropdown menu found at “Installation → URCaps → Gentle TCP Configuration” (Figure 6) and press the “Add TCP” button. To change TCP values, select the text field, enter a new value and press the “Save Changes” button.
To activate this configuration, navigate to “Installation → TCP”, select the added configuration from the dropdown menu and set it as default (Figure 8).
Soft Gripper Configuration Node
Confirm that the pink wire is connected to the an output port or confirm wrist connection for e-series. This node is available at “Installation → URCaps → Gentle Gripper”. Select the output port connected to the gripper from the dropdown menu (Figure 7). Figure 4 Settings, e-Series Figure 5 Installation, e-Series Figure 6 TCP Configuration, e-Series9
The button below the dropdown menu will set the output to true (releasing) or false (gripping). If the button displays “Initialize” and/or “Start”, click on the button and it will attempt to access the digital IO. The button and dropdown disable themselves if the attempt fails.
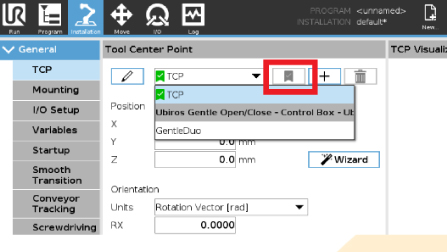
Figure 8 PolyScope TCP Window, e-Series
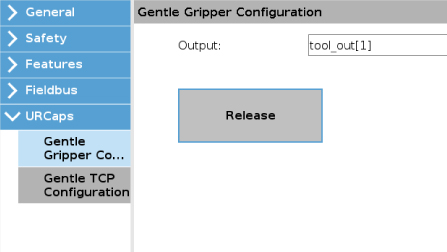
Figure 7 Gripper Configuration, e-Series
Gripper Actuation in Program
To add the gripper actuation node, go to “Program → URCaps” and select “Gentle Open or Close”. Select the “Gentle Open or Close” item from the program structure and switch to the “Command” tab. On the gripper actuation node screen, select either “Open” to open the gripper, or “Close” to close the gripper. Alternatively, you can use the SET function to set the gripper’s digital or tool output to 1 (HIGH - Open) or 0 (LOW - Close) to operate the gripper if you choose not to use the actuation program node.
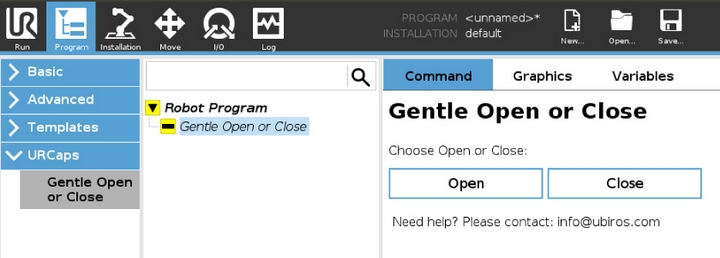
Figure 9 Gripper Actuation in Program, e-Series
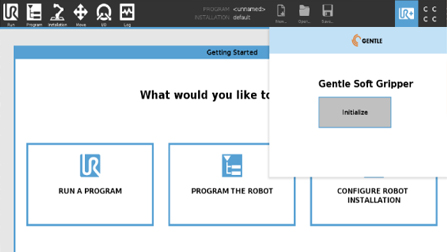
Figure 10 Toolbar, e-Series
Toolbar (e-Series only)
To use the toolbar, select the UR+ icon and the UBIROS - Gentle logo in the toolbar (Figure 10). Pressing the button will toggle the gripper between an opened and closed state. If the button displays “Release” it is in a gripping state and vice versa. If “Initialize” and/or “Start” are displayed, select the button to attempt IO access.
Universal Robots CB-Series
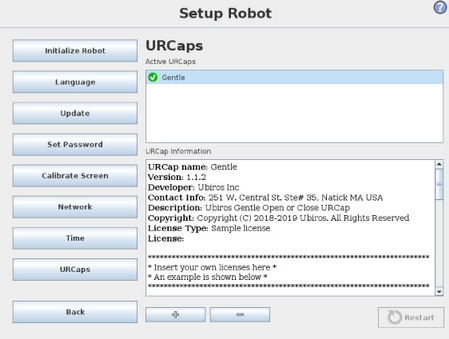
Figure 11 URCap Installation, CB-Series
Installation
Copy the URCap downloaded from https://www.ubiros.com/urcap.html to a blank USB drive. Insert the USB drive into the teach pendant or controller. Select “Setup Robot” on the main screen and choose “URCaps → +” (Figure 11). Navigate the available drives to find and select the .urcap file. Restart PolyScope to finish installation. To add a TCP configuration, see the TCP Configuration section.
Uninstallation
To uninstall this URCap, navigate back to the screen shown in Figure 11 for e-Series, select the URCap and press the “-“ button.
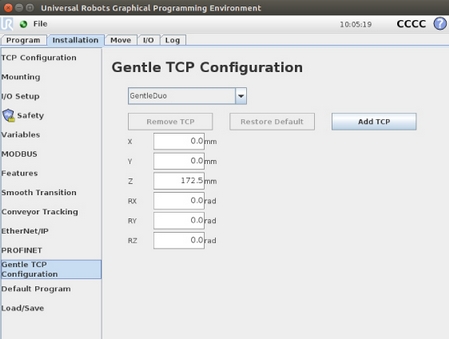
Figure 12 Gentle TCP Configuration, CB-Series
TCP Configuration
The window in Figure 12 is available at “Program Robot → Installation → Gentle TCP Configuration”. To install the tool center point, choose your Gentle product from the dropdown menu and
press the “Add TCP” button. To change the TCP values, select the text field, enter the new value and press the “Save Changes” button.
The “Remove TCP” button will remove the displayed configuration, and the “Restore Default” button will restore the default tool center point settings. To set the added TCP configuration as active, navigate to “Program Robot → Installation → TCP Configuration”, select the added configuration from the dropdown menu and set it as default.
Gripper Actuation in Program
To add the gripper actuation node, go to “Program Robot → Program → Structure → URCaps” and select “Gentle Open or Close” (Figure 13). Select the “Gentle Open or Close” item from the program structure and switch to the “Command” tab (Figure 14). On the gripper actuation node screen, select either “Open” to open the gripper, or “Close” to close the gripper. Alternatively, you can use the SET function to set the gripper’s digital output to 1 (HIGH - Open) or 0 (LOW - Close) to operate the gripper if you choose not to use the actuation program node.
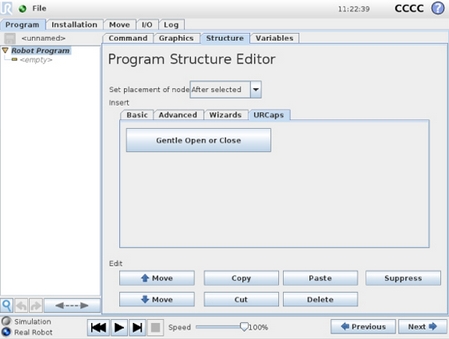
Figure 13 Add Program Node, CB-Series
Gripper Configuration Node
Confirm that the pink wire is connected to the correct output port. This node in Figure 15 is available at “Installation → Gentle Gripper”. Select the output port connected to the gripper from the dropdown menu. Tool outputs are not available on CB series. The button below the dropdown menu will set the output to true (releasing) or false (gripping). If the button displays “Initialize” and/or “Start”, click on the button and it will attempt to access the digital IO. The button and dropdown disable themselves if the attempt fails.
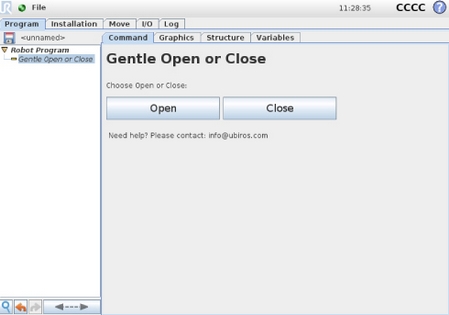
Figure 14 Gripper Actuation Node, CB-Series
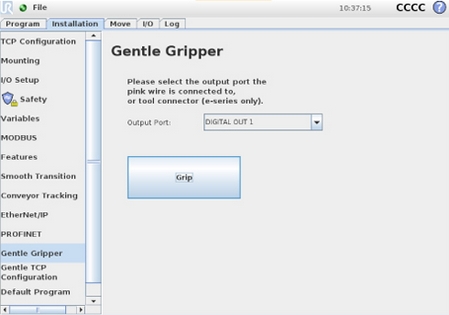
Figure 15 Gripper Configuration Node, CB-Series
URCap (Download for Free)
This element is available for download free of charge