GENTLE DUO

A FLEXIBLE 2-FINGER SOFT ROBOT GRIPPER
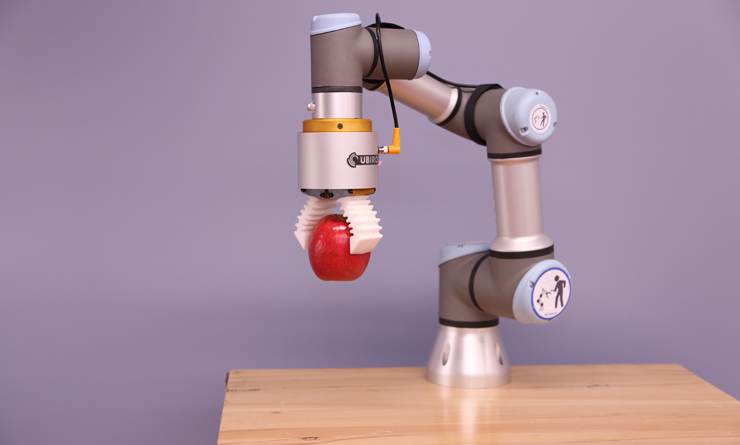
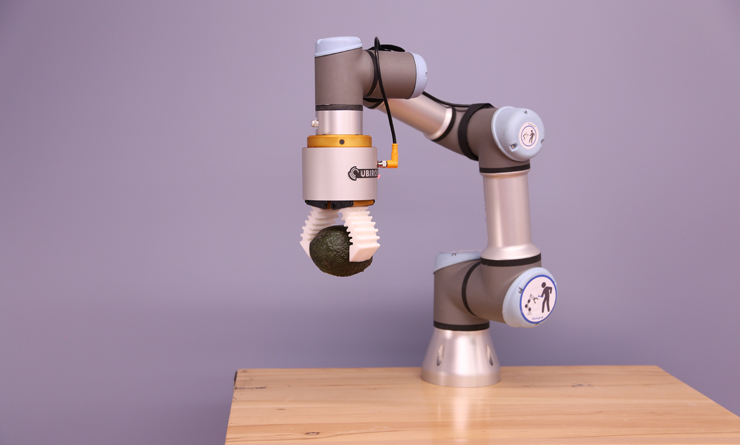
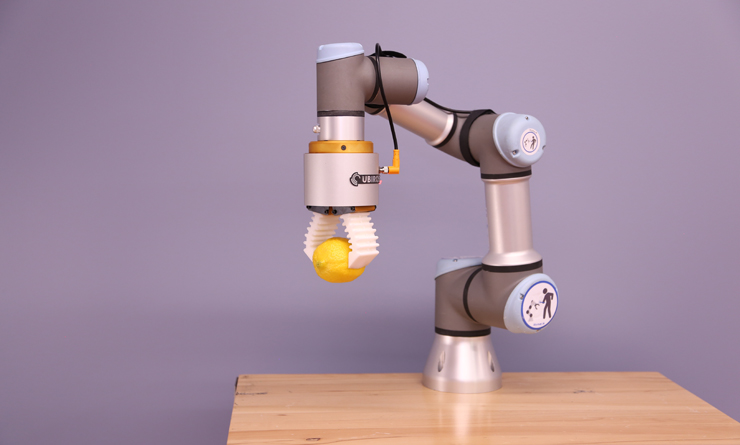
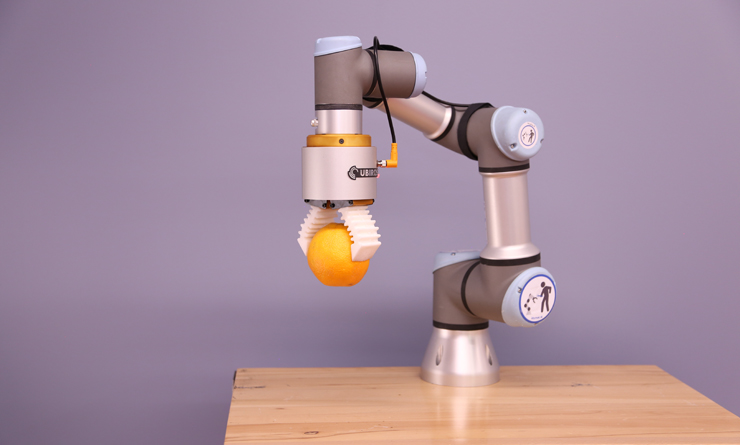
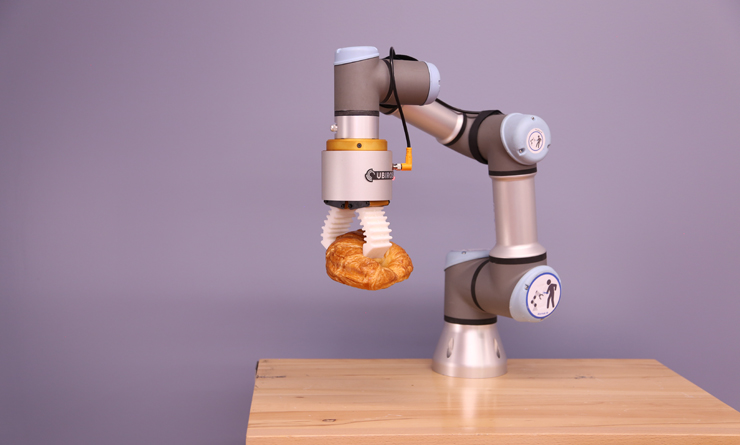
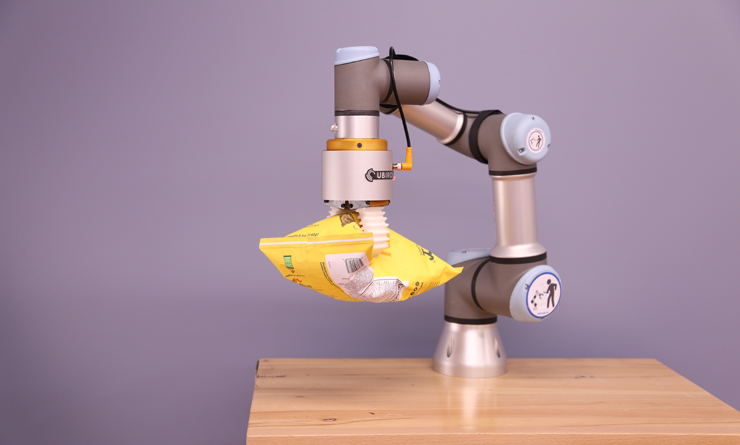
Gentle Duo Mini, provides an optimal balance of versatility and grip stability in handling delicate objects or products that vary in size, shape, and weight during primary packaging. Ideal for pick-and-place applications of smaller items and for projects with a narrow range of motion. Gentle Duo Mini is compatible with all cobots. Safely handle fragile and delicate objects for higher production quality and reduced waste.
It is the first fully electrical soft gripper (with force feedback option) in the market.
Base Features:
- FDA approved silicone fingers
- High throughput (200 ms cycle time)
- 1.5 kg (3.3 lbs) payload
- Fully electrical interface
- Waterproof (tested under 1900PSI)
- Food safe 2-finger soft gripper
- Mobile/wireless setup




Downloads:

Gentle Flex Module
You get the ultimate freedom to design your own soft gripper by using the Flex Modules.

Gentle Duo
Our most versatile gripper with 2 soft fingers for handling products that vary in size, shape, and weight. Compatible with all cobots.

Gentle Pro
Soft and adaptive surfaces are ideal for fault-tolerant handling and a safe collaboration with humans.

Which product should you choose?
Check out our video library, message us if you don't see your product or something similar.
Need Assistance with Your UBIROS Product? We're Here to Help.
24/7 Support

Technical Specifications
Gripper Dimensions
(diameter, height)
100 / 172 mm (3.9 / 6.8 in)
Input Voltage
15 V - 25 V
Enclosure Dimensions
(diameter, height)
100 / 84 mm (3.9 / 3.3 in)
Max. Current
(idle / load / instantaneous)
0.03 A / 2 A / 3 A
Finger dimensions
(Length / Width / Depth)
75 / 20 / 40 mm (3.0 / 0.8 / 1.6 in)
Control Interface
1 or 2* Digital Inputs
Number of fingers
2
Part Confirmation
Digital Output*, Adjustable Threshold
Max finger opening (tip)
175 mm (6.9 in)
Force control
Yes*
Finger distance (base)
28 mm (1.1 in)
Finger material
Silicone, FDA Approved**
Weight
800 g (1.8 lbs)
Enclosure material
Anodized Aluminum
Payload
1,500 g (3.3 lbs)
Flange
ISO 31.5-63
Grasping time
100 ms / 50 mm (100 ms / 2 in)
Individual finger actuation
Enabled**
Maximum cycle
1,500,000
Water Proofing
Sealed, Not certified
* Touch model only | ** Available upon request
Soft Gripper Mounting
Your package includes a universal mechanical adapter to mount Gentle Duo Mini on your robotic arm. It allows Gentle Duo Mini to be mounted on all ISO flanges between 31.5 mm and 63 mm. See the dimensions of the universal mounting plate below (Figure 1 >>).
Mounting steps
- Attach the universal mounting adapter to your robot’s tool flange using 4 screws (provided)
- Insert UBIROS Gentle Duo Mini inside the Universal Mounting Plate
- Put the provided M3 screws through the holes on the side wall and tighten gently

Figure 1: Universal mounting adapter
Electrical Connection
Gentle Duo Mini soft gripper, requires 24V power and takes in a digital input signal of up to 24V to open and close the fingers to predefined positions. Please note Gentle Duo Mini’s digital input requires at least 13V to turn HIGH. For the full list of specifications, see >>.
Universal Robots e-Series
- Connect the short cable to the connector at the wrist
- Turn Tool Output 1 power to 24V (sourcing) using the teach pendant
Universal Robots CB-series
Provided connection cable comprises 3 flying leads:
- Attach the flying leads in appropriate pins in the control box as follows:
- The RED lead to any 0V pin
- The GREY lead to any 24V pin
- The PINK lead to a DO pin
KUKA IIVA
Flanges: media flange IO pneumatic (X11-X12), media flange IO electrical (X41, 42), media flange IO valve pneumatic (X91, X92)
- Connect the short cable to one of the 8-pin connectors at the wrist
- Turn on the power (24V)
Yaskawa Motoman HC10 w/YRC1000 micro controller
- Provide a separate 24VDC power supply for connection through the “S” connector at the base of the robot and through to connector S-2 (0.3mm2 pins 9 – 16) at the wrist exit. Two of the wires will supply Gentle Duo Mini with power from the auxiliary power supply. The PINK Gentle Duo Mini lead is signal where +24V is gripper open and 0V is gripper closed. Select a third wire from S-2 for the signal that will pass through the S connector at the base.
- Apply a low current coil relay similar to the Releco C10-A10X (Coil draws 32mA @ 24VDC) to the din rail with the CN4 breakout board. Pass the +24V from the aux power supply through the normally open contact and out to the robot wrist via the third wire selected (in step 1) passing to the wire in the S-2 connector. That will be used as the digital input to Gentle Duo Mini as follows:
- Attach to one side of the relay coil a digital output pin on the CN4 (OUT 5 is pin #16) This is an NPN output so if the coil is polarity sensitive connect it to the negative.
- Attach a +24V for Output Load terminal to the other side of the coil (Pin 15 on the CN4 is one such pin)
Operation
Universal Robots e- and CB-Series
Download UBIROS Gentle URCap from https://www.ubiros.com/urcap.html for easy operation. Refer to the URCap manual at the end of this manual to learn more about its usage. You can also use the SET function to set the Tool Output 1 (TO1) or the appropriate Digital Output (DOx) to 1 (HIGH - Open) or 0 (LOW - Close) to operate. Refer to the URCap manual at the end of this manual to learn more about its usage.
KUKA IIVA
Flanges: media flange IO pneumatic (X11-X12), media flange IO electrical (X41, 42), media flange IO valve pneumatic (X91, X92)
If you plugged your cable in X11, X41, or X91, set MF_Output_0 to 1 (HIGH - Open) or 0 (LOW - Close) to operate, otherwise Set MF_Output_2 appropriately.
Yaskawa Motoman HC10 w/YRC1000 micro controller
Just add a DigitalOut command in your program to open or close the UBIROS. In the wiring example from earlier in this document it would be a DigitalOut #5 ON (see Figure 2) to open it and a DigitalOut #5 OFF to close it, be sure to add a timer to allow the gripper time to open or close before your next action.

Figure 2: Sample Code for Yaskawa HC10
On the DT versions of the HC10 you can also tie the wrist button 2 to the output you are using and in
hand jogging mode that button will toggle the gripper open/closed.
Soft Gripper Setup
Gentle Duo Mini is pre-programmed to host its own WiFi Access Point. You can adjust Gentle Duo Mini’s settings by following the steps below:

Figure 3: Gentle Duo Mini Control Panel
- Connect any WiFi-enabled device to the WiFi network named “<Product ID>”. (Please note that this network is not connected to the Internet)
- Enter the WiFi password: GentleUbiros
- After the connection is established, open any web browser and go to: http://192.168.4.1/ to access the control panel.
- Using the sliders on the page adjust the finger stroke to the best level for your application. Positive numbers move fingers inwards towards the palm. Click “Go and Gentle will show the new position.
- If you wish, enter a new current threshold above which the part confirmation signal will turn HIGH.
- Enter the maximum current level in the Force Limitation Setting at an appropriate level to ensure a firm grasp without overexerting the fingers.
- Click “Set Values” to make positions permanent (will survive a power cycle).
- If fingers are misaligned, use Finger Calibration buttons to move each finger in or out in small increments to adjust. Remember to hit “Set Values” after any adjustment.
URCap Software for Soft Gripper
The integration of our Gentle soft grippers with your UR robot is now easier than ever. We have developed a URCap* that makes the gripper installation a breeze and put you in production in literally minutes.
Where / How To Buy UBIROS Soft Gripper
Getting UBIROS soft gripper is now easier than ever! UBIROS has partnered with select distributors to offer genuine UBIROS products for customers around the world.